ABSTRACT:
The
brushless DC (BLDC) motor has numerous applications in high-power systems; it
is simple in construction, is cheap, requires less maintenance, has higher
efficiency, and has high power in the output unit. The BLDC motor is driven by
an inverter. This paper presents design and simulation for a three-phase
three-level inverter to drive the BLDC motor. The multilevel inverter is driven
by discrete three-phase pulse width modulation (DPWM) generator that
forced-commuted the IGBT’s three-level converters using three bridges to
vectored outputs 12- pulses with three levels. Using DPWM with a three-level inverter
solves the problem of harmonic distortions and low electromagnetic
interference. This topology can attract attention in high-power and
high-performance voltage applications. It provides a three-phase voltage source
with amplitude, phase, and frequency that are controllable. The proposed model
is used with the PID controller to follow the reference speed signal designed by
variable steps. The system design is simulated by using Matlab/Simulink.
Satisfactory results and high performance of the control with steady state and
transient response are obtained. The results of the proposed model are compared
with the variable DC-link control. The results of the proposed model are more
stable and reliable.
KEYWORDS:
1. Brushless
DC Motor
2. Multilevel Inverter
3. High-Performance Drive
4. Pulse Width Modulation (PWM)
5. Maltlab
6. Simulink
SOFTWARE: MATLAB/SIMULINK
BLOCK DIAGRAM:

EXPECTED SIMULATION RESULTS:

Figure. 2. Output of three-phase three-level inverter with
DPWM.

Figure 3. The sample from output of the DPWM

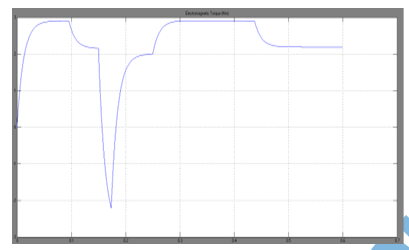
Figure 4. Analysis of response for the proposed MLI with
PID controller of BLDC motor.

Figure 5. Two outputs of controllers with proposed MLI and
variable DC-link
CONCLUSION:
The
proposed MLI performance analysis was successfully presented by using
Matlab/Simulink software. The proposed topology can be easily extended to a
higher-level inverter. The simulation results were sine waves and exhibited
fewer ripples and low losses. This system would show its feasibility in practice.
The vector control was described in adequate detail and was implemented with a
three-level MLI. This method enabled the operation of the drive at zero direct
axis stator current. Transient results were obtained when a DPWM was started
from a standstill to a required speed. The performance of the vector control in
achieving a fast reversal of PDPWM even at very high speed ranges is quite
satisfactory. The performance of the proposed three-phase MLI was investigated
and was found to be quite satisfactory. A comparison was made between the PID
controller–based proposed model MLI and the controller with variable DC-link voltage.
The results showed that the proposed model responded better in transient and
steady states and was more reliability with high performance.
REFERENCES:
[1]
P. D. Kiran, M. Ramachandra, “Two-Level and Five-Level Inverter Fed BLDC Motor
Drives”, International Journal of Electrical and Electronics Engineering
Research, Vol. 3, Issue 3, pp 71-82, Aug 2013
[2]
N. Karthika, A. Sangari, R. Umamaheswari , “Performance Analysis of Multi Level
Inverter with DC Link Switches for Renewable Energy Resources”, International
Journal of Innovative Technology and Exploring Engineering, Volume-2, Issue-6,
pp 171-176, May 2013
[3]
A. Jalilvand R. Noroozian M. Darabian, “Modeling and Control Of Multi-Level
Inverter for Three-Phase Grid-Connected Photovoltaic Sources”, International
Journal on Technical and Physical Problems of Engineering, Iss. 15, Vol. 5,
No.2, pp 35-43, June 2013
[4]
P. Karuppanan, K. Mahapatra, “PI, PID and Fuzzy Logic Controlled Cascaded
Voltage Source Inverter Based Active Filter For Power Line Conditioners”, Wseas
Transactions On Power Systems, Issue 4, Volume 6, pp 100-109, October 2011
[5]
D. Balakrishnan, D. Shanmugam, K.Indiradevi, “Modified Multilevel Inverter
Topology for Grid Connected PV Systems”, American Journal of Engineering
Research, Vol. 02, Iss.10, pp-378-384, 2013