ABSTRACT
In this paper a Power Factor Correction Cuk converter
fed Brushless DC Motor Drive using a Artificial Neural Network is used. The
Speed of the Brushless dc motor is controlled by varying the output of the DC
capacitor. A Diode Bridge Rectifier followed by a Cuk converter is fed into a Brushless
DC Motor to attain the maximum Power Factor. Here we are evaluating the three
modes of operation in discontinuous mode and choosing the best method to
achieve maximum Power Factor and to minimize the Total Harmonic Distortion. We
are comparing the conventional PWM scheme to the proposed Artificial neural network.
Here simulation results reveal that the ANN controllers are very effective and
efficient compared to the PI and Fuzzy controllers, because the steady state
error in case of ANN control is less and the stabilization if the system is
better in it. Also in the ANN methodology the time taken for computation is
less since there is no mathematical model. The performance of the proposed
system is simulated in a MATLAB/Simulink environment and a hardware prototype
of the proposed drive is developed to validate its performance.
KEYWORDS:
1.
Brushless dc motor,
2.
Discontinuous input inductor mode
3.
Discontinuous output inductor mode
4.
Discontinuous intermediate capacitor mode
5.
Cuk converter
6.
Power Factor Correction
7.
Total Harmonic Distortion
8.
Artificial Neural Network
9.
Pulse width modulation
SOFTWARE: MATLAB/SIMULINK
BLOCK DIAGRAM:


Fig 1.Proposed Scheme using
Artificial Neural Network
EXPECTED SIMULATION RESULTS:

Fig 2.Simulation Waveforms a)
Input voltage (Vin) b) Input current (Iin) c) Output voltage(Vcd)
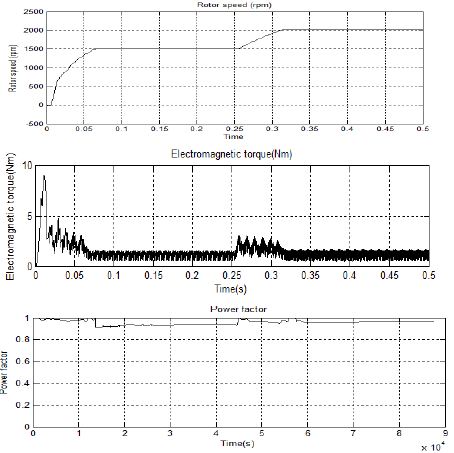
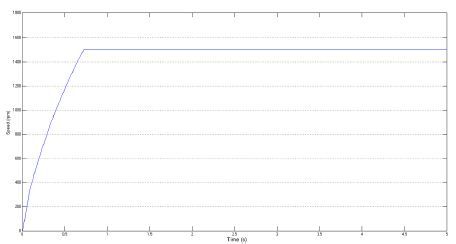
Fig.3
a)Speed(rpm) b)Electromagnetic torque(Nm) c)Power factor

Fig 4
Stator back emfs (Ea,Eb,Ec)
CONCLUSION
A
Power Factor Corrected Cuk converter fed BLDC motor using Artificial neural
network is simulated in the environment of MATLAB. A Diode Bridge Rectifier followed
by a Cuk converter is fed into a Brushless DC Motor to attain the maximum Power
Factor. Here we are evaluating the three modes of operation in discontinuous
mode and choosing the best method to achieve maximum Power Factor and to
minimize the Total Harmonic Distortion.The three modes Discontinuos
DICM(Li),DICM(Lo),DCVM(Vco) is simulated at the given switching frequency
20Khz.The diode bridge followed by a Cuk converter is used here for maximum Power
Factor Correction.The power factor obtaine in ANN is 0.9818 which is near to
unity. The main advantage of using Artificial neural network is that in
conventional PI only one value that is feed back is selected and comparing and producing
the gating pulse but in our proposed scheme a set of values is compared and we
are choosing the best out of them.
REFERENCES
[1] J.
F. Gieras and M.Wing, Permanent Magnet Motor Technology—Design and Application.
New York, NY, USA: Marcel Dekker, Inc, 2002.
[2] C.
L. Xia, Permanent Magnet Brushless DC Motor Drives and Controls.Beijing, China:
Wiley, 2012.
[3] Y.
Chen, C. Chiu, Y. Jhang, Z. Tang, and R. Liang, “A driver for the singlephase
brushlessDCfan motor with hybrid winding structure,” IEEE Trans.Ind. Electron.,
vol. 60, no. 10, pp. 4369–4375, Oct. 2013.
[4] S.
Nikam, V. Rallabandi, and B. Fernandes, “A high torque density permanent magnet
free motor for in-wheel electric vehicle application,” IEEE Trans. Ind. Appl.,
vol. 48, no. 6, pp. 2287–2295, Nov./Dec. 2012.
[5] X.
Huang, A. Goodman, C. Gerada, Y. Fang, and Q. Lu, “A single sided matrix
converter drive for a brushless DC motor in aerospace applications,” IEEE
Trans. Ind. Electron., vol. 59, no. 9, pp. 3542–3552, Sep. 2012..