ABSTRACT:
This paper describes the application of Takagi–Sugeno
(TS)-type fuzzy logic controller to a three-phase shunt active power filter for
the power-quality improvement and reactive power compensation required by a
nonlinear load. The advantage of fuzzy logic control is that it does not
require a mathematical model of the system. The application of the Mamdani-type
fuzzy logic controller to a three-phase shunt active power filter was
investigated earlier but it has the limitation of a larger number of fuzzy sets
and rules. Therefore, it needs to optimize a large number of coefficients,
which increases the complexity of the controller. On the other hand, TS fuzzy controllers
are quite general in that they use arbitrary input fuzzy sets, any type of
fuzzy logic, and the general defuzzifier. Moreover, the TS fuzzy controller
could be designed by using a lower number of rules and classes. Further, in
this paper, the hysteresis current control mode of operation is implemented for
pulsewidth-modulation switching signal generation. Computer simulation results
show that the dynamic behavior of the TS fuzzy controller is better than the
conventional proportional-integral (PI) controller and is found to be more
robust to changes in load and other system parameters compared to the
conventional PI controller.
KEYWORDS:
1.
Dynamic
behavior of the controller
2.
Power quality improvement
3.
Shunt active power filter
4.
Takagi–Sugeno (TS) fuzzy logic controller
SOFTWARE: MATLAB/SIMULINK
BLOCK DIAGRAM:
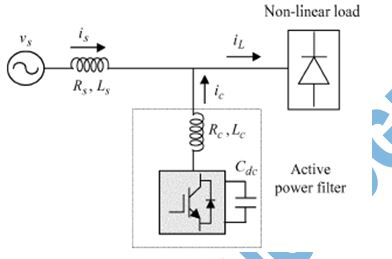
Fig. 1. Basic compensation principle of APF.
EXPECTED SIMULATION RESULTS:

Fig. 2. Source voltage

Fig. 3. Source current when the
compensator is not connected.

Fig.
4. Source current: PI controller.

Fig. 5. Source current: TS fuzzy
controller

Fig. 6. Load current.

Fig. 7. DC capacitor voltage:
load is increased at 0.3 s.

Fig. 8. Source current: PI
controller.

Fig. 9. Source currents: TS fuzzy
controller

Fig.
10. Load current.

Fig. 11. DC capacitor voltage:
load is reduced at 0.3 s.

Fig. 12. Source current: PI
controller

Fig. 13. Source currents: TS
fuzzy controller.

Fig. 14. THD in source currents.
CONCLUSION:
A
TS fuzzy-logic-controlled shunt active power filter has been developed to
improve the performance of controller for load compensation. The performance of
the TS fuzzy logic controller is compared with the conventional PI controller.
The harmonic elimination process is simple, and it is implemented by sensing
line currents only. From the simulation results, it is clear that the dc
voltage excursion of the TS fuzzy controller is better than the conventional PI
controller under various load conditions as well as filter parameter variations.
The dc-link voltage settles approximately within two cycles for the large
change in load and also the excursion in voltage is less compared to the PI
controller. For the changes in filter parameters (and), the performance of the
TS fuzzy controller remains the same. Hence, the TS fuzzy controller is quite
robust for system parameter variations. The THD of the source current after
compensation is well below the permissible limit of 5%. TS fuzzy control is
better than the Mamdani type of fuzzy control in the sense that it requires
only two numbers of fuzzy sets, four rules, and five numbers of coefficients to
be optimized compared to seven fuzzy sets, 49 rules, and 17 coefficients used for
the Mamdani type used in [11]. Hence, the TS fuzzy controller is a good
candidate for improving the dynamic performance of a compensator and
eliminating the harmonics.
REFERENCES:
[1]
H. Akagi, Y. Kanazawa, and A. Nabae, “Instantaneous reactive power compensators
comprising switching devices without energy storage components,” IEEE Trans.
Ind. Appl., vol. IA-20, no. 3, pp. 625–630, May/Jun. 1984.
[2]
F. Z. Peng, H. Akagi, and A. Nabae, “Study of active power filters using quad
series voltage source PWM converters for harmonic compensation,” IEEE Trans.
Power Electron., vol. 5, no. 1, pp. 9–15, Jan. 1990.
[3]
W. M. Grady,M. J. Samotyj, and A. H. Noyola, “Survey of active power line
conditioning methodologies,” IEEE Trans. Power Del., vol. 5, no. 3, pp.
1536–1542, Jul. 1990.
[4]
B. Singh, A. Chandra, and K. Al-Haddad, “Computer-aided modeling and simulation
of active power filters,” Elect. Mach. Power Syst., vol. 27, pp.
1227–1241, 1999.
[5]
K. Chatterjee, B. G. Fernandes, and G. K. Dubey, “An instantaneous reactive
volt-ampere compensator and harmonic suppressor system,” IEEE Trans. Power
Electron., vol. 14, no. 2, pp. 381–392, Mar. 1999..














