ABSTRACT
This paper introduces and evaluates an auxiliary
control strategy for downstream fault current interruption in a radial distribution
line by means of a dynamic voltage restorer (DVR). The proposed controller
supplements the voltage-sag compensation control of the DVR. It does not
require phase-locked loop and independently controls the magnitude and phase
angle of the injected voltage for each phase. Fast least error squares digital
filters are used to estimate the magnitude and phase of the measured voltages
and effectively reduce the impacts of noise, harmonics, and disturbances on the
estimated phasor parameters, and this enables effective fault current
interrupting even under arcing fault conditions. The results of the simulation
studies performed in the PSCAD/EMTDC software environment indicate that the
proposed control scheme: 1) can limit the fault current to less than the
nominal load current and restore the point of common coupling voltage within 10
ms; 2) can interrupt the fault current in less than two cycles; 3) limits the
dc-link voltage rise and, thus, has no restrictions on the duration of fault
current interruption; 4) performs satisfactorily even under arcing fault
conditions; and 5) can interrupt the fault current under low dc-link voltage
conditions.
KEYWORDS
1. Digital
filters
2. Dynamic
Voltage Restorer (DVR),
3.
Fault current
interrupting,
4.
Multiloop
control.
SCHEMATIC
DIAGRAM

Fig. 1.
Schematic diagram of a DVR with a line-side harmonic filter

Fig. 2. Single-line diagram of the system used for simulation studies.
SIMULATION RESULTS




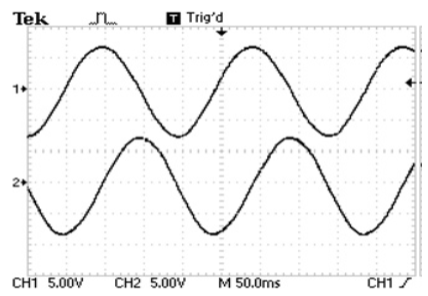
Fig. 6.
(a) Voltages at Bus3. (b) Fault currents, during the downstream single phase-to-ground arcing fault
when the DVR is inactive (bypassed).
CONCLUSION
This
paper introduces an auxiliary control mechanism to enable the DVR to interrupt downstream
fault currents in a radial distribution feeder. This control function is an
addition to the voltage-sag compensation control of the DVR. The performance of
the proposed controller, under different fault scenarios, including arcing
fault conditions, is investigated based on time-domain simulation studies in
the PSCAD/EMTDC environment. The study results conclude that:
•
the proposed multiloop control system provides a desirable transient response
and steady-state performance and effectively damps the potential resonant
oscillations caused by the DVR LC harmonic filter;
• the proposed control system detects and
effectively interrupts the various downstream fault currents within two cycles (of
50 Hz);
• the proposed fault current interruption
strategy limits the DVR dc-link voltage rise, caused by active power
absorption, to less than 15% and enables the DVR to restore the PCC voltage without
interruption; in addition, it interrupts the downstream fault currents even
under low dc-link voltage conditions.
• the proposed control system also performs
satisfactorily under downstream arcing fault conditions.
REFERENCES
[1] N. G. Hingorani, “Introducing custom
power,” IEEE
Spectr., vol. 32, no. 6,
pp. 41–48, Jun. 1995.
[2] J. G. Nielsen, F. Blaabjerg, and N.
Mohan, “Control strategies for dynamic voltage restorer compensating voltage
sags with phase jump,” in Proc.
IEEE APEC’, 2001, pp.
1267–1273.
[3] G. J. Li, X. P. Zhang, S. S. Choi, T.
T. Lie, and Y. Z. Sun, “Control strategy for dynamic voltage restorers to
achieve minimum power injection without introducing sudden phase shift,” Inst. Eng. Technol. Gen. Transm. Distrib., vol. 1, no. 5, pp. 847–853, 2007.
[4] S. S. Choi, B. H. Li, and D. M.
Vilathgamuwa, “Design and analysis of the inverter-side filter used in the
dynamic voltage restorer,” IEEE Trans. Power Del., vol. 17, no. 3, pp. 857–864, Jul. 2002.
[5] B. H. Li, S. S. Choi, and D. M.
Vilathgamuwa, “Design considerations on the line-side filter used in the
dynamic voltage restorer,” Proc.
Inst. Elect. Eng., Gen. Transm.
Distrib., vol. 148, no. 1,
pp. 1–7, Jan. 2001.